SBRBC-01��ҵ�����˻�������վ�豸(ABB������ϵͳ)
��
һ�� �豸��ͼ��
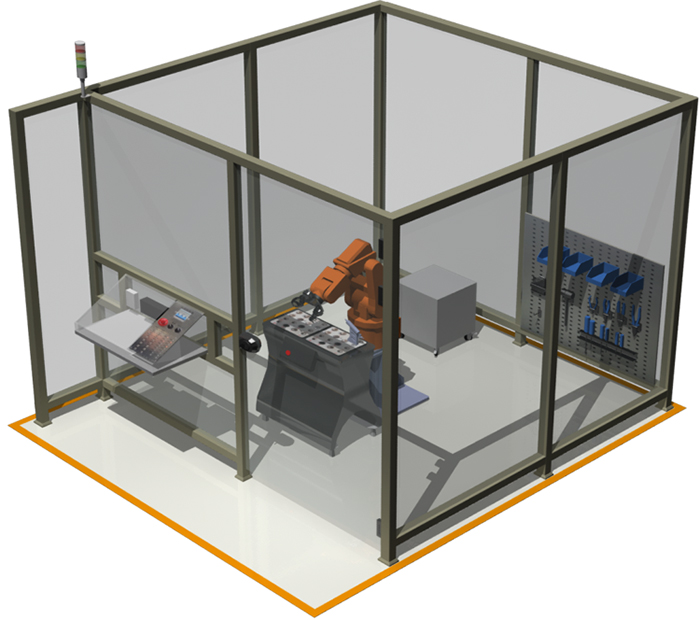
��ͼƬ�����ο�����ʵ������Ϊ��

��ҵ�����˻������ܹ����Ұ�����Ƭ�������ο���
�����豸������
�豸���ڹ�ҵ�����˻���������ѵӦ���豸����6�������Ϊ���ģ���������Ҫ�����ò�ͬ�������壬����ѧ���Ի����˻���֪ʶ����֪������ģ�͵Ŀ���������Ȥζ���������ԣ���������ѧԱ��ѧϰ��Ȥ��ͨ�����ϵ��ظ�ѵ����ǿ��ѧԱ�Ի����ĵ�ʾ�̡�ֱ�ߡ����ߵ��˶��㼣���˽������գ�ѧϰ��ȷ��Ķ�λ���������˶�·��ѡ���Ż���ʹѧ���Ի�����Ӧ�ü����г����˽������ա�
���豸�����������ģ�黯��ƣ��߱������ԡ������ԡ�����ֲ�Ե��ص㣻��Ԥ������չ�������Ľӿڣ������г�������в��ϵĿ�����������ѧУ�û����д�������µĹ���ģ�顣
��Թ�ҵ������Ӧ��ά��רҵ��������ѵ����ʵϰ���ý����ڻ��繤ѧ����༼����ҵ�����˹��ɵĹؼ����ڣ�ͨ�����ײ����Ļ����˱��������ѧϰ����ǿ��ȫ��ʶ��淶��ʶ����������ѧ����������빤ҵ������"��"��
��������������
������Դ������������ AC220V��5%��50HZ
��ȫ������©�籣����������������·����
����ʣ���2KW
�����¶ȣ�-10��50��
����¶ȣ���85%
���γߴ磺L2200��3000mm��W2200��3000mm��H2000mm(�ο�)
�ġ���Ʒ���ò�����
1����ҵ�����˱���ϵͳ���ò�����
1�� ���ܡ��������ص�������
�� ABB������IRB120-3/0.58����Ч����3kg����չ0.58�ף��ظ���λ����0.01mm�����Ͻ�����ṹ���ɣ�����ǿ����ȷ�����ȣ�������25kg����ǶȰ�װ����ʹ�䲻���κοռ����ƣ���·��·���û��ź������ɻ�����������ȫ��Ƕ��������ڲ������ڻ����˼��ɣ�
�� ����IRC5��ҵ�����Ϳ���������Ч��ʡռ�ؿռ䣬AC220V��Դ������ʽ�źŽ�ͷ�����˵��Բ��裻
�� ��RobotStudio�����˿�������������Ч��������ٶȣ����������湦�ܣ�����ʱ��֤���Ч����
�� ���嵽������3��7m�����£�
�� ʾ���������IJ������棬���嵽ʾ����3��7m�����£�
�� ��DC24V 16in/16out IO����
�� ������20mm��ְ�����160mm�ֹܺ��Ӷ��ɣ����淢�ڴ�����������ã�����Ч��ֹ��ʴ���װ���6��������˿�����̶�����֤��װ���ȹ̣����ӻ����˵����Ϳ�����ر��ʺ�С�ͻ����˰�װ�������������ͬ���ͻ����˰�װʹ�ã��ߴ磺400��350��405mm��
�� ����3���ŷ��飬Ϊ�����˰�װ��ͬ�о��ṩ���������ӷ����ݣ�
2�� �������ã�
|
��� |
���� |
�� �� |
��λ |
���� |
|
1 |
������ |
IRB120-3/0.58 3���� |
�� |
1 |
|
1) |
���� |
3����,580mm�г̰뾶 |
̨ |
1 |
|
2) |
������ |
220V��Դ���������� |
�� |
1 |
|
3) |
IO�� |
24V ��16����/16��� |
�� |
1 |
|
4) |
�������� |
�����˹��� |
�� |
1 |
|
2 |
�����˵��� |
�ְ庸�� |
̨ |
1 |
|
3 |
��ŷ��� |
3����� |
�� |
1 |
3�� ��ҵ������ϵͳͼƬ��

2���������ư����ò�����
1�� ���ܡ��������ص�������
�� ������������л����������ڹ۲죬��������ڲ�����Ԫ�����������ˮƽ30?б����ƣ�������������۲���ɣ��������ʣ���T��̨����ƣ������в�С��350mm��300mm�Ŀհ����������ϴ�ţ��л�����������ȡ�£�����ά��������
�� ��������������©�翪�ء���ͣ��ť��ת�����ء�ť�ӿ��ء�LEDָʾ�ƣ�©�翪����Ϊ�豸�ĵ�Դ���ƣ��ɹ�������·�ȱ������ܣ���ͣ��ť���ڷ���ͻ������½����жϵ�Դ�������¹ʵ�����ת�����������豸��Դ�ϵ�ʹ�ã���·ť�ӿ�����Ϊ�����ź���������źŹ���������������ƻ��������У���·LED�������������źŹ�����ʵʱָʾ�����˵�ǰ����״̬��Ч��ֱ�ۣ�������������2mm����ּӹ����ɣ�����ӡ��ÿ��Ԫ����Ŵ��룻
�� ��ܲ����������ļӹ��������ɣ�������ۣ�
�� �װ��������ӽ�ӹ���Ϳ���ɣ����ӳ����״�ṹ���������Ԫ����װ��
�� �װ尲װPLC�������Ӵ��������ص�Դ���̵����ȵ���Ԫ���������Ӵ����ṩ�豸��Դ�Ľ�����Ͽ������豸��������Դ�����ص�ԴΪ�豸�����ṩ��Ҫ�İ�ȫ������Դ���̵�����Ϊ�����źŵ�ת��Ϊ�ⲿ���ֿ��Ʒ����ṩ���㣻Ϊ��֤�������źŵľ���ȫ��ͨ��PLC����������������źŽ���ת��������ͨ��PLC������ı��ⲿ�ź���������źŹ����Ķ����ԣ����ڿ���ѧԱ��֤ѧϰЧ������������Ķ�����ѡ��
�� �ߴ磺605��405��266mm��
2�� �������ã�
|
��� |
���� |
�� �� |
��λ |
���� |
|
1 |
�����Ӵ��� |
CJX2-2510 220V |
�� |
1 |
|
2 |
���ص�Դ |
24V 3.5A |
�� |
1 |
|
3 |
��ͣ��ť |
HB22-11TS�� |
�� |
1 |
|
4 |
��ťʽ��ť���� |
NP2-BD����22/��/ |
�� |
1 |
|
5 |
ť�ӿ��� |
MTS-102 |
�� |
1 |
|
6 |
��·�� |
DZ47-60/3P |
̨ |
1 |
|
7 |
�̵��� |
CR-M024DC4L |
�� |
1 |
|
8 |
ָʾ����·�� |
LEDָʾ�� |
�� |
1 |
|
9 |
������� |
S304��ʴ�̣� |
�� |
1 |
|
10 |
���� |
��������װ |
�� |
1 |
|
11 |
������ |
�л�����ȫ�� |
�� |
1 |
|
12 |
֧�ֿ�� |
���ļӹ� |
�� |
1 |
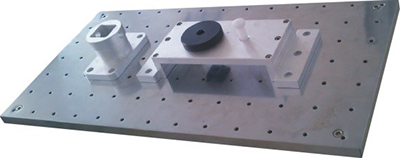
3��ģ��ʵѵƽ̨���ò�����
1�� ���ܡ��������ص�������
�� ����֧�żܣ�������ƣ��������ۣ��Ľ���������˿�����̶���������أ�
�� ����̨��壬���12mm��������t����������40��40mm���� M5���ư�װ�ף��ܹ������ο���װ���ֹ����������ݣ�
�� ���õ����ӿںУ�1·��·���ƽӿڲ��ܶ�����������е��ڣ�1·��ͣ��ť�Ա�ͻ�����������ʹ�ã�1��ģ���źŽӿڣ��ɽ��봫�����źż����������ŷ����źš�
2���������ã�
|
��� |
���� |
�� �� |
��λ |
���� |
|
1 |
̨��� |
12mm���ƣ��ɸ��� |
�� |
1 |
|
2 |
��ͣ��ť |
HB22-11TS�� |
�� |
1 |
|
3 |
����ֱͨ��ͷ |
J-KJE06-00 |
�� |
1 |
|
4 |
�ɵ����� |
ASC100-06 |
�� |
1 |
|
5 |
����ֱͨ��ͷ |
APC6-01 |
�� |
2 |
|
6 |
��ѹʽ���� |
3λ |
�� |
2 |
|
7 |
֧�ż� |
���Ƽӹ� |
�� |
1 |
3�� ģ��ʵѵƽ̨ͼƬ��

4����ͼ�ʼо����ò�����
1�� ���ܡ��������ص�������
�� ���ļӹ������������ʸ��ڿգ���װ���о���л��ƣ���װ��������J6���ϣ����ܸ������ƶԱʸ����������е��������ڹ켣ѵ��ģ������ʹ�á�
2�� �������ã�
|
��� |
���� |
�� �� |
��λ |
���� |
|
1 |
�ʼ� |
���ƣ��ӹ����� |
�� |
1 |
|
2 |
�ʸ� |
���ƣ��ӹ����� |
�� |
1 |
|
3 |
��ͷ |
��ͭ���ӹ� |
�� |
1 |
|
4 |
��װ�� |
���ƣ��ӹ����� |
�� |
1 |
3�� ��ͼ�ʼо�ͼƬ��

5��ץ�����̼о����ò�����
1�� ���ܡ��������ص�������
�� ���ļӹ���������������ץ�����������ֹ��ܣ��ܶԶ������Ͻ��д�����ץ�ּ��������ֹ��ܣ��ֱܷ�ץȡ������״���ͬ�����ϣ�����Ҳ��2·��ƣ��ɷֱ����ʹ�ã�Ҳ��ͬʱ���ʹ�ã��ɸ���Ҫ��ѡ��һ�ֻ���ַ�ʽͬʱʹ�ã������ѧ�����Լ�����ѡ���ԡ�
2�� �������ã�
|
��� |
���� |
�� �� |
��λ |
���� |
|
1 |
������� |
ZPT06BN-A5 |
�� |
2 |
|
2 |
�������� |
HDT10*20 |
�� |
1 |
|
3 |
������ |
J-AS1201F-M5 |
�� |
2 |
|
4 |
��շ����� |
ZH07BS-06-06 |
�� |
2 |
|
5 |
�����ͷ |
M-5E |
�� |
2 |
|
6 |
��ͷ |
J-KQ2H06-M5 |
�� |
2 |
|
7 |
���Ӽ� |
���ƣ��ӹ����� |
�� |
1 |
|
8 |
������� |
ZPT06BN-A5 |
�� |
2 |
3�� ץ�����̼о�ͼƬ��

6��˫���̼о����ò�����
1�� ���ܡ��������ص�������
�� ���ļӹ�����������2·���̶�����ƣ��ɷֱ����ʹ�ã�Ҳ��ͬʱ���ʹ�ã������㲣���塢��Բ�Ρ����Ρ�����ǡ�����Ρ������Ρ������Ͽ顢���������ϵȶ������ϵ���ȡ�������������о�ͨ�ã�
2�� �������ã�
|
��� |
���� |
�� �� |
��λ |
���� |
|
1 |
������� |
ZPT10UN-A5 |
�� |
2 |
|
2 |
ֱͨ��ͷ |
KQ2F06-M5A |
�� |
2 |
|
3 |
��շ����� |
ZH07BS-06-06 |
�� |
2 |
|
4 |
���Ӽ� |
���ƣ��ӹ����� |
�� |
1 |
3�� ˫���̼о�ͼƬ��

7���������̼о����ò�����
1�� ���ܡ��������ص�������
�� ���ļӹ�����������2·���̶�����ƣ��ɷֱ����ʹ�ã�Ҳ��ͬʱ���ʹ�ã�������Գ������������ϵ���ȡ�����ڳ���Ϳ��ģ������ʹ�á�
2�� �������ã�
|
��� |
���� |
�� �� |
��λ |
���� |
|
1 |
������� |
ZPT06BN-A5 |
�� |
2 |
|
2 |
�����ͷ |
M-5E |
�� |
2 |
|
3 |
��ͷ |
J-KQ2H06-M5 |
�� |
2 |
|
4 |
��շ����� |
ZH07BS-06-06 |
�� |
2 |
3�� �������̼о�ͼƬ��

8���켣ѵ��ģ�����ò�����
1�� ���ܡ��������ص�������
�� ����ּӹ����죬�Ľ���˿�̶�����װ�����ݣ�������ƽ���뻡����ɣ��ۼ���Ȼ���ɣ���ƽ�桢������ʴ�̲�ͬͼ�ι����ͼ�����Ի�ͼ�ʼо����ͼ�Σ�ѵ���Ի����˻����ĵ�ʾ�̣�ֱ�ߡ������˶��㼣�����գ�ѧϰ��Ķ�λ���������˶�·��ѡ���Ż���
2�� �������ã�
|
��� |
���� |
�� �� |
��λ |
���� |
|
1 |
����ּӹ��� |
���ƣ����Ӽӹ� |
�� |
1 |
|
2 |
ʴ�̷��� |
ʴ�̹��� |
�� |
1 |
3�� �켣ѵ��ģ��ͼƬ��

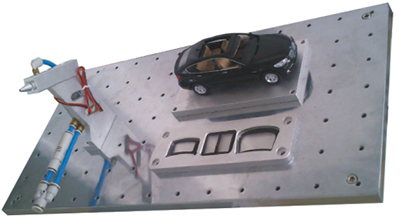
9������װ��ģ�����ò�����
1�� ���ܡ��������ص�������
�� ��һ���̶��ڲ���̨����Ϊ����"����3"��
�� ������ͨ��ץ�ֻ�����ʰȡ"����1"����"����1"��ȷװ�䵽����"����3"�ڣ�
�� ������ͨ��ץ�ֻ�����ʰȡ"����2"����"����2"�������´���"����1"��"����3"����Ӳ����"����2"����"����1"��"����3"�ڣ�
��"����1"װ�䵽"����3"���ô��϶���װ�䣬"����2"װ�������ַ�ʽ�����Դ������£�Ҳ���ԴӲ��洩�룻
�� ѵ���Ի����˾�ȷ��λ��ץ�����̼оߵ�ѧϰ��
2�� �������ã�
|
��� |
���� |
�� �� |
��λ |
���� |
|
1 |
����3 |
���ƣ��ӹ����� |
�� |
1 |
|
2 |
���ð� |
���ƣ��ӹ����� |
�� |
1 |
|
3 |
����1 |
PVC�ӹ� |
�� |
1 |
|
4 |
����2 |
PVC�ӹ� |
�� |
1 |
3�� ����װ��ģ��ͼƬ��
10������Ϳ��װ��ģ�����ò�����
1�� ���ܡ��������ص�������
�� Ϳ����������ģ�͵װ塢����������ֱ�̶�������̨�ϣ�
�� ������ͨ�����̼оߵ�����������ʰȡ������������ʰȡ�ij�����Ϳ��������Ϳ������ɺ�ѳ���װ�䵽�����ϣ�����ʰȡ�ڶ��鳵�����������ǰ������ʰȡ��Ϳ����װ������
�� ��ϰ�Ի����˵��ʾ�̡��������˶��켣ѡ����Ϳ��������ϡ�
2�� �������ã�
|
��� |
���� |
�� �� |
��λ |
���� |
|
1 |
�ȵ�ʽ��ŷ� |
SBJ512-5LZD-M5 |
�� |
1 |
|
2 |
����ģ�� |
1:32 |
̨ |
1 |
|
3 |
��շ����� |
ZH07BS-06-06 |
�� |
1 |
|
4 |
Y����ͨ |
KJU06-00 |
�� |
1 |
|
5 |
L��ͷ |
KQ2L06-M5 |
�� |
3 |
|
6 |
���Ӽ� |
���ƣ��ӹ����� |
�� |
1 |
3�� ����Ϳ��װ��ģ��ͼƬ��
11��������ģ�����ò�����
1�� ���ܡ��������ص�������
�� ���ļӹ����������ϰڷŰ������̶�������̨��
�� ����Ҫ�����Ͽ鱻�ڷŵ��ڷŵװ��ϣ�������ͨ�����̼о߰�Ҫ��ʰȡ���Ͽ����������
�� ���Ͽ���״���һ�£������߿ɸ�����Ҫѡ��ڷ��������ɵ��������Ӱڷţ��ɸ�����Ҫ�����������������״��
�� ��ϰ�Ի�������⡢���е����Ⲣ���ٱ��ʾ�̵�ǿ��ѵ����
2�� �������ã�
|
��� |
���� |
�� �� |
��λ |
���� |
|
1 |
������� |
���ƣ��ӹ����� |
�� |
1 |
|
2 |
����ڷŰ� |
���ƣ��ӹ����� |
�� |
1 |
|
3 |
������Ͽ� |
������ɫ |
�� |
1 |
3�� ������ģ��ͼƬ��

12��ͼ�����ģ�����ò�����
1�� ���ܡ��������ص�������
�� ��Ϊ��һ��״ͼ����ˡ�����״ͼ����ˣ�
�� ����״ͼ����ˣ�������ͨ�����̼о����ΰ�һ��ͼ���ڷźõĶ�����״���ϣ����Ρ�Բ�Ρ�����Ρ������Ρ�����ǣ�ʰȡ���˵���һ�����ϰ��ϣ�
�� ������ͼ����ˣ�������ͨ�����̼о����ΰ�һ��ͼ���ڷźõ���ͼ��ʰȡ���˵���һ��ͼ����ϣ�
�� ÿ��ͼ����Ӧ��λ��ʴ�������ϱ�ţ�
�ݰ�����ʽ�ɸ���Ҫ�������ϣ���ʽ������������ƽ�桢���С�ָ�����λ�á�����ͼ���ϵ�Ҫ��
�� ǿ���Ի����˵�λ��ѵ�������⡣
2���������ã�
|
��� |
���� |
�� �� |
��λ |
���� |
|
1 |
��������1 |
���ƣ�ʴ�̺��룩�ӹ����� |
�� |
2 |
|
2 |
��������2 |
���ƣ�ʴ�̺��룩�ӹ����� |
�� |
2 |
|
3 |
ͼ������1 |
POM���ף���е�ӹ� |
�� |
16 |
|
4 |
ͼ������2 |
POM����ǡ���ߡ����ߡ��ıߡ�Բ�Σ���е�ӹ� |
�� |
20 |
3�� ͼ�����ģ��ͼƬ��

13���������ģ�����ò�����
1�� ���ܡ��������ص�������
�� ��ⲣ�������������ƣ���ⷽʽΪ�ֱ�����εij�����̱ߣ�
�� ������ԭʼ�������ڴ洢���ڣ��ڷ�װ�ò��ö̱߲��룬��Ϊ�������������ݼ�����ֱ泤�ߣ�
�� ������ͨ�����̼о�����ʰȡ�����嵽���̨��⣬���ݼ���жϲ�������ѡ����뷽������ѭ����
�� ѵ���Ի����˶��в�ͬ����ж�ѡ��ľ�ȷ��λ��
2�� �������ã�
|
��� |
���� |
�� �� |
��λ |
���� |
|
1 |
���˷Ŵ��� |
D10BFP |
�� |
1 |
|
2 |
���� |
PBT46U |
�� |
1 |
|
3 |
���ģ������ |
��ɫ���л����� |
�� |
8 |
|
4 |
���Ӽ� |
���Ƽӹ����� |
�� |
1 |
3�� �������ģ��ͼƬ��
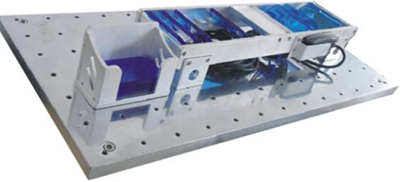
14��ʵѵ����洢�����ò�����
1�� ���ܡ��������ص�������
�� �洢����óߴ磺720 mm��380 mm��550mm
�� �ɶ����ţ����ܲ��ö������Ͻ��ܰ��ߣ���Ƿ����������������ã��ڳ�EVA EPE�����࣬����Ч���õر����豸����ֹ�������ˣ�
�� �������లװ�������֣����ö���ѹ������������������������һ�壬����ο�������ˣ�
�� ���嶥���ĽǴ���ײ��ǣ�����Ч���������еĿ�����ͬʱ������Ϊ��Ŷ��������Ź̶�֧�ţ����ٴ�������
�� �����ڲ��ɷֲ�洢������ÿ���ж����洢���̣����������ּ�֧�������ӽ�ӹ�����������ο����ڳIJ����������ϣ��Դ���㲿��λ�õ�ģ�ӹ�����֤λ��ȷ��
�� �����ÿ�����50kg�������ⲿ�ɳ���200KG��
2�� �������ã�
|
��� |
���� |
�� �� |
��λ |
���� |
|
1 |
���� |
��ɫ����� |
�� |
1 |
|
2 |
�������� |
����� |
�� |
1 |
|
3 |
������� |
����� |
�� |
1 |
|
4 |
����� |
2.0mm���ӽ�ӹ� |
�� |
1 |
|
5 |
������� |
���Ͻ� |
�� |
1 |
|
6 |
������� |
���������� |
�� |
1 |
|
7 |
�ڳ� |
Ӳ��ĭ����װģ������ |
�� |
1 |
3�� ʵѵ����洢��ͼƬ��

15����������ǽ���ò�����
1�� ���ܡ��������ص�������
�� 2.0mm���ʺ�������������ɣ��̶ܹ���ǽ���ϣ�
�� ��10�������λ�ã�ÿ��λ�ô��ж���Ŀ�ӻ�������ʶ��
�� ���ڴ�Ÿ��ֹ�����˿��ĸ�����������ֱ�ۣ���ŷ��㣬���ڰ��ˣ�ռ�ÿռ�С���ǹ�������洢���ܵ��������壻
2���������ã�
|
��� |
���� |
�� �� |
��λ |
���� |
|
1 |
�Ұ� |
���Ƽӹ���˿ӡ��Ŀ�ӻ����� |
�� |
1 |
|
2 |
���� |
�ڷŹ��� |
�� |
1 |
3����������ǽͼƬ��
16����ȫ�������ò��������ֳ���������
1�� ���ܡ��������ص�������
�� ���뻤���������2000mm����ܲ���2mm���ɫ���Ͻ���ϣ�����ȫ����װ10mm�����ֻ���������һ����ţ�ռ����2200��3000mm��2200��3000mmΪ�ˣ�
�� ϵͳ����վ��װ�м�ͣ��ť���Ա��������ʹ�ã�
�� ��ɫ��ʾ���Բ�ͬ��ɫ��ʾϵͳ��ǰ����״̬��
�� �ŴŰ�ȫ���ذ�װ�ڽ�����λ�ã���֤ϵͳ����ʱ��ȫ���ǹرյģ�����������ȫ��
�� ȫ��������Ƽ���֤�豸����ʱ�İ�ȫ���ֲ�Ӱ��ι���ʾЧ����
�� �ڸ��뻤������ȫ�š��豸������λ��ճ�����ְ�ȫ��ʶ��ʵʱ�����豸�İ�ȫ���С�
2�� �������ã�
|
��� |
���� |
�� �� |
��λ |
���� |
|
1 |
��ʾ�� |
DC24V 5W ���̺� |
�� |
1 |
|
2 |
��ȫ���� |
LG-03F |
�� |
1 |
|
3 |
�����߲� |
40*30 |
�� |
8 |
|
4 |
�������ֳ������� |
�ֻ��岣��10mm |
��² |
8��18 |
|
5 |
��ȫ��ʾ |
�续���� |
�� |
1 |
|
6 |
�ͲĿ�ܣ��ֳ������� |
2mm�� |
�� |
12��18 |
17������ѹ����������

1�� �ص�������
�� ������12L
2�� ����ѹ����ͼƬ��
�塢��Ʒ�ص㣺
�� ����ʽ��ƣ��ɸ���ʵѵ����ѡ�������ʹ�üо�����ģ�ͣ�������ѧԱ��Ըѡ����ʵѵƽ̨�İ�װλ�ü������Ҿ��кܺõ������ͣ��ͻ��ɸ����Լ���������ģ�ͼ��оߡ�
�� ģ�����ã�����ģ�ͼ��о�ȫ��װ��ʵѵ����洢���ڣ�ʹ�ñ��淽���ݣ���Լ�ռ䣬���ڹ�����
����SBRBC-01��ҵ�����˻������ܹ���վ�����嵥
|
��� |
�� �� �� �� |
�� �� �� �� |
��λ |
���� |
|
1 |
ABB-IRB120������ |
SBRBC-01-01 |
̨ |
1 |
|
2 |
ģ��ʵѵƽ̨ |
SBRBC-01-02 |
̨ |
1 |
|
3 |
�켣ѵ��ģ�� |
SBRBC-01-03 |
̨ |
1 |
|
4 |
����װ��ģ�� |
SBRBC-01-04 |
̨ |
1 |
|
5 |
�������ģ�� |
SBRBC-01-05 |
̨ |
1 |
|
6 |
����Ϳ��װ��ģ�� |
SBRBC-01-06 |
̨ |
1 |
|
7 |
������ģ�� |
SBRBC-01-07 |
̨ |
1 |
|
8 |
ͼ�����ģ�� |
SBRBC-01-08 |
̨ |
1 |
|
9 |
�������ư���� |
SBRBC-01-09 |
̨ |
1 |
|
10 |
��ȫ���������2�ף� |
SBRBC-01-10A |
�� |
1 |
|
11 |
����ǽ��� |
SBRBC-01-11 |
̨ |
1 |
|
12 |
����˫���̼о� |
SBRBC-01-12 |
̨ |
1 |
|
13 |
������ͼ�ʼо� |
SBRBC-01-13 |
̨ |
1 |
|
14 |
����ץ�����̼о� |
SBRBC-01-14 |
̨ |
1 |
|
15 |
�����������̼о� |
SBRBC-01-15 |
̨ |
1 |
|
16 |
����ѹ���� |
TYW-1A 12L |
̨ |
1 |
|
17 |
��ҵ�����˻�������վ��ABB��ʹ��˵���� |
SBRBC-01 |
�� |
1 |
|
18 |
��ҵ�����˻�������վ(ABB)������ |
SBRBC-01 |
�� |
1 |
|
19 |
ʵѵ����װ�� |
SBRBC-01-21 |
�� |
1 |
�ߡ���Ҫʵѵ������Ŀ��
1����ҵ�����˵Ļ�����ʶ��
2����ҵ������ʾ�����˶�������
3����ҵ�����˵ĵ�λʾ�̣�
4����ҵ�����˻����������ã�
5����ҵ�����˻����˶�ָʾѧϰ��
6����ҵ�����˻���ʾ�����ij���༭��
7����ҵ�����˿���Ӧ�ã�
8����ҵ�����˻������߷�����
9���켣���б����ʾ�̣�
10��ƽ����ͼ��������ʾ�̣�
11��Բ����ͼ��������ʾ�̣�
12��������ͼ��������ʾ�̣�
13���̶�λ�ð��˱����ʾ�̣�
14��ָ��λ�ð��˱����ʾ�̣�
15��ƽ����������������ʾ�̣�
16�����̼оߵĿ�����Ӧ�ã�
17��ץ�ּоߵĿ�����Ӧ�ã�
18������װ������ı����ʾ�̣�
19�������������������ʾ�̣�
20������Ϳ������ı����ʾ�̣�
21����ͼ�ʼоߵİ�װ��
22���켣ѵ��ģ�͵İ�װ��
23��˫���̼оߵİ�װ��
24��ͼ�����ģ�͵İ�װ��
25��������ģ�͵İ�װ��
26��ץ�����̼оߵİ�װ��
27������װ��ģ�͵İ�װ��
28���������ģ�͵İ�װ����ߣ�
29������Ϳ��ģ�͵İ�װ��������·���ӡ���





